#include <spCollisionNode.hpp>
Public Member Functions | |
| virtual | ~CollisionNode () |
| virtual s32 | getSupportFlags () const =0 |
| virtual f32 | getMaxMovement () const =0 |
| virtual void | setMaterial (CollisionMaterial *Material) |
| Sets the collision material. | |
| virtual void | findIntersections (const dim::line3df &Line, std::list< SIntersectionContact > &ContactList) const |
| virtual bool | checkIntersection (const dim::line3df &Line, SIntersectionContact &Contact) const |
| virtual bool | checkIntersection (const dim::line3df &Line, bool ExcludeCorners=false) const |
| virtual bool | checkCollision (const CollisionNode *Rival, SCollisionContact &Contact) const |
| Checks for a collision between this collision object and the rival object. | |
| virtual bool | checkCollision (const CollisionNode *Rival) const |
| Checks if this collision node has any collision with the given rival collision node. | |
| virtual void | performCollisionResolving (const CollisionNode *Rival) |
| Checks for a collision between this collision object and the rival object and performs collision resolving as well. | |
| void | setupTransformation (const dim::matrix4f &Matrix) |
| void | updateTransformation () |
| void | setPosition (const dim::vector3df &Position, bool UpdatePrevPosition=true) |
| Sets the global position of the scene node. | |
| void | setOffset (const dim::matrix4f &Matrix, bool Enable=true) |
| Sets the transformation offset. This matrix will be multiplied to the scene-node's global transformation. | |
| void | updateCollisions () |
| ECollisionModels | getType () const |
| Returns the collision model type. | |
| void | setFlags (s32 Flags) |
| s32 | getFlags () const |
| Returns teh flags for collision detection. By default COLLISIONFLAG_FULL. | |
| SceneNode * | getNode () const |
| Returns a pointer to the SceneNode object. | |
| CollisionMaterial * | getMaterial () const |
| Returns the collision material. | |
| dim::vector3df | getPosition () const |
| Returns the global position of the scene node. | |
| void | translate (const dim::vector3df &Direction) |
| Wrapper function for SceneNode::translate. | |
| void | move (const dim::vector3df &Direction) |
| Wrapper function for SceneNode::move. | |
| void | turn (const dim::vector3df &Rotation) |
| Wrapper function for SceneNode::turn. | |
| void | setRotation (const dim::matrix4f &Rotation) |
| Sets the global rotation of the scene node. | |
| dim::matrix4f | getRotation () const |
| Returns the global rotation of the scene node. | |
| void | setScale (const dim::vector3df &Scale) |
| Sets the global scaling of the scene node. | |
| dim::vector3df | getScale () const |
| Returns the global scaling of the scene node. | |
| const dim::matrix4f & | getTransformation () const |
| Returns the global node's transformation. | |
| const dim::matrix4f & | getInverseTransformation () const |
| Returns the global node's inverse transformation. | |
| void | getOffset (dim::matrix4f &Matrix, bool &Enable) const |
| Returns the transformation offset. | |
| dim::vector3df | getNodePosition () const |
| dim::vector3df | getPrevPosition () const |
Protected Member Functions | |
| CollisionNode (CollisionMaterial *Material, SceneNode *Node, const ECollisionModels Type) | |
| virtual bool | checkCollisionToSphere (const CollisionSphere *Rival, SCollisionContact &Contact) const |
| virtual bool | checkCollisionToCapsule (const CollisionCapsule *Rival, SCollisionContact &Contact) const |
| virtual bool | checkCollisionToCylinder (const CollisionCylinder *Rival, SCollisionContact &Contact) const |
| virtual bool | checkCollisionToCone (const CollisionCone *Rival, SCollisionContact &Contact) const |
| virtual bool | checkCollisionToBox (const CollisionBox *Rival, SCollisionContact &Contact) const |
| virtual bool | checkCollisionToPlane (const CollisionPlane *Rival, SCollisionContact &Contact) const |
| virtual bool | checkCollisionToMesh (const CollisionMesh *Rival, SCollisionContact &Contact) const |
| virtual bool | checkAnyCollisionToSphere (const CollisionSphere *Rival) const |
| virtual bool | checkAnyCollisionToCapsule (const CollisionCapsule *Rival) const |
| virtual bool | checkAnyCollisionToCylinder (const CollisionCylinder *Rival) const |
| virtual bool | checkAnyCollisionToCone (const CollisionCone *Rival) const |
| virtual bool | checkAnyCollisionToBox (const CollisionBox *Rival) const |
| virtual bool | checkAnyCollisionToPlane (const CollisionPlane *Rival) const |
| virtual bool | checkAnyCollisionToMesh (const CollisionMesh *Rival) const |
| virtual void | performCollisionResolvingToSphere (const CollisionSphere *Rival) |
| virtual void | performCollisionResolvingToCapsule (const CollisionCapsule *Rival) |
| virtual void | performCollisionResolvingToCylinder (const CollisionCylinder *Rival) |
| virtual void | performCollisionResolvingToCone (const CollisionCone *Rival) |
| virtual void | performCollisionResolvingToBox (const CollisionBox *Rival) |
| virtual void | performCollisionResolvingToPlane (const CollisionPlane *Rival) |
| virtual void | performCollisionResolvingToMesh (const CollisionMesh *Rival) |
| bool | notifyCollisionContact (const CollisionNode *Rival, const SCollisionContact &Contact) |
| Returns true if the collision is about to be resolved. | |
| bool | performDetectedContact (const CollisionNode *Rival, const SCollisionContact &Contact) |
| Returns true if the collision has been resolved. | |
| bool | checkCornerExlusion (const dim::line3df &Line, const dim::vector3df &Point) const |
| void | updatePrevPosition () |
Friends | |
| class | CollisionGraph |
| class | CollisionMaterial |
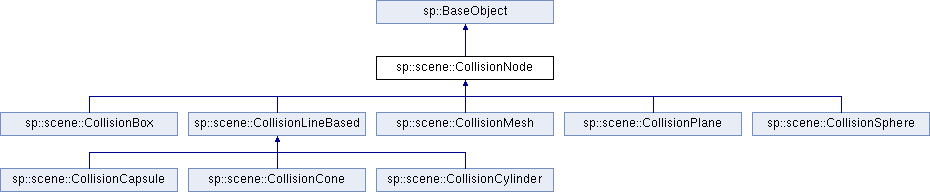
CollisionNode is the root class for all collision models which are sphere, box, mesh and terrain. Its particular an interface for derived collision models.
| sp::scene::CollisionNode::~CollisionNode | ( | ) | [virtual] |
| sp::scene::CollisionNode::CollisionNode | ( | CollisionMaterial * | Material, | |
| SceneNode * | Node, | |||
| const ECollisionModels | Type | |||
| ) | [protected] |
| bool sp::scene::CollisionNode::checkAnyCollisionToBox | ( | const CollisionBox * | Rival | ) | const [protected, virtual] |
| bool sp::scene::CollisionNode::checkAnyCollisionToCapsule | ( | const CollisionCapsule * | Rival | ) | const [protected, virtual] |
| bool sp::scene::CollisionNode::checkAnyCollisionToCone | ( | const CollisionCone * | Rival | ) | const [protected, virtual] |
| bool sp::scene::CollisionNode::checkAnyCollisionToCylinder | ( | const CollisionCylinder * | Rival | ) | const [protected, virtual] |
| bool sp::scene::CollisionNode::checkAnyCollisionToMesh | ( | const CollisionMesh * | Rival | ) | const [protected, virtual] |
| bool sp::scene::CollisionNode::checkAnyCollisionToPlane | ( | const CollisionPlane * | Rival | ) | const [protected, virtual] |
| bool sp::scene::CollisionNode::checkAnyCollisionToSphere | ( | const CollisionSphere * | Rival | ) | const [protected, virtual] |
| bool sp::scene::CollisionNode::checkCollision | ( | const CollisionNode * | Rival, | |
| SCollisionContact & | Contact | |||
| ) | const [virtual] |
Checks for a collision between this collision object and the rival object.
| bool sp::scene::CollisionNode::checkCollision | ( | const CollisionNode * | Rival | ) | const [virtual] |
Checks if this collision node has any collision with the given rival collision node.
| bool sp::scene::CollisionNode::checkCollisionToBox | ( | const CollisionBox * | Rival, | |
| SCollisionContact & | Contact | |||
| ) | const [protected, virtual] |
| bool sp::scene::CollisionNode::checkCollisionToCapsule | ( | const CollisionCapsule * | Rival, | |
| SCollisionContact & | Contact | |||
| ) | const [protected, virtual] |
| bool sp::scene::CollisionNode::checkCollisionToCone | ( | const CollisionCone * | Rival, | |
| SCollisionContact & | Contact | |||
| ) | const [protected, virtual] |
| bool sp::scene::CollisionNode::checkCollisionToCylinder | ( | const CollisionCylinder * | Rival, | |
| SCollisionContact & | Contact | |||
| ) | const [protected, virtual] |
| bool sp::scene::CollisionNode::checkCollisionToMesh | ( | const CollisionMesh * | Rival, | |
| SCollisionContact & | Contact | |||
| ) | const [protected, virtual] |
| bool sp::scene::CollisionNode::checkCollisionToPlane | ( | const CollisionPlane * | Rival, | |
| SCollisionContact & | Contact | |||
| ) | const [protected, virtual] |
| bool sp::scene::CollisionNode::checkCollisionToSphere | ( | const CollisionSphere * | Rival, | |
| SCollisionContact & | Contact | |||
| ) | const [protected, virtual] |
| bool sp::scene::CollisionNode::checkCornerExlusion | ( | const dim::line3df & | Line, | |
| const dim::vector3df & | Point | |||
| ) | const [protected] |
| bool sp::scene::CollisionNode::checkIntersection | ( | const dim::line3df & | Line, | |
| SIntersectionContact & | Contact | |||
| ) | const [virtual] |
Checks for an intersection between this collision object and the given line and stores the result in the specified contact structure.
| Line,: | Specifies the line which could intersect this object. | |
| Contact,: | Specifies the structure where the intersection result will be stored. |
Reimplemented in sp::scene::CollisionBox, sp::scene::CollisionCapsule, sp::scene::CollisionCone, sp::scene::CollisionCylinder, sp::scene::CollisionMesh, sp::scene::CollisionPlane, and sp::scene::CollisionSphere.
| bool sp::scene::CollisionNode::checkIntersection | ( | const dim::line3df & | Line, | |
| bool | ExcludeCorners = false | |||
| ) | const [virtual] |
Returns true if an intersection between this collision object and the given line exists but does not return any further information.
| Line,: | Specifies the line which could intersect this object. | |
| ExcludeCorners,: | Specifies whether the line's corners should be ingored. This can be useful for ray-tracing or lightmapping to avoid self-shadowing. |
Reimplemented in sp::scene::CollisionBox, sp::scene::CollisionCapsule, sp::scene::CollisionCone, sp::scene::CollisionCylinder, sp::scene::CollisionMesh, sp::scene::CollisionPlane, and sp::scene::CollisionSphere.
| void sp::scene::CollisionNode::findIntersections | ( | const dim::line3df & | Line, | |
| std::list< SIntersectionContact > & | ContactList | |||
| ) | const [virtual] |
Checks for intersections between this collision object and the given line and stored the result in the specified contact list.
| Line,: | Specifies the line which could intersect this object. | |
| ContactList,: | Specifies the list where all the intersection results will be stored. |
Reimplemented in sp::scene::CollisionMesh.
| s32 sp::scene::CollisionNode::getFlags | ( | ) | const [inline] |
Returns teh flags for collision detection. By default COLLISIONFLAG_FULL.
| const dim::matrix4f& sp::scene::CollisionNode::getInverseTransformation | ( | ) | const [inline] |
Returns the global node's inverse transformation.
| CollisionMaterial* sp::scene::CollisionNode::getMaterial | ( | ) | const [inline] |
Returns the collision material.
| virtual f32 sp::scene::CollisionNode::getMaxMovement | ( | ) | const [pure virtual] |
Returns the maximal movement (e.g. for a sphere it's the radius). This is used internally. A collision node can still be moved faster than this value.
Implemented in sp::scene::CollisionBox, sp::scene::CollisionLineBased, sp::scene::CollisionMesh, sp::scene::CollisionPlane, and sp::scene::CollisionSphere.
| SceneNode* sp::scene::CollisionNode::getNode | ( | ) | const [inline] |
Returns a pointer to the SceneNode object.
| dim::vector3df sp::scene::CollisionNode::getNodePosition | ( | ) | const [inline] |
Returns the node position stored after updating the collision node's transformation. This is used internally and can differ from the collision node's transformation.
| void sp::scene::CollisionNode::getOffset | ( | dim::matrix4f & | Matrix, | |
| bool & | Enable | |||
| ) | const [inline] |
Returns the transformation offset.
| dim::vector3df sp::scene::CollisionNode::getPosition | ( | ) | const [inline] |
Returns the global position of the scene node.
| dim::vector3df sp::scene::CollisionNode::getPrevPosition | ( | ) | const [inline] |
Returns the previous position stored in the previous frame. This is used internally and can differ from the collision node's transformation.
| dim::matrix4f sp::scene::CollisionNode::getRotation | ( | ) | const [inline] |
Returns the global rotation of the scene node.
| dim::vector3df sp::scene::CollisionNode::getScale | ( | ) | const [inline] |
Returns the global scaling of the scene node.
| virtual s32 sp::scene::CollisionNode::getSupportFlags | ( | ) | const [pure virtual] |
| const dim::matrix4f& sp::scene::CollisionNode::getTransformation | ( | ) | const [inline] |
Returns the global node's transformation.
| ECollisionModels sp::scene::CollisionNode::getType | ( | ) | const [inline] |
Returns the collision model type.
| void sp::scene::CollisionNode::move | ( | const dim::vector3df & | Direction | ) | [inline] |
Wrapper function for SceneNode::move.
| bool sp::scene::CollisionNode::notifyCollisionContact | ( | const CollisionNode * | Rival, | |
| const SCollisionContact & | Contact | |||
| ) | [protected] |
Returns true if the collision is about to be resolved.
| void sp::scene::CollisionNode::performCollisionResolving | ( | const CollisionNode * | Rival | ) | [virtual] |
Checks for a collision between this collision object and the rival object and performs collision resolving as well.
| void sp::scene::CollisionNode::performCollisionResolvingToBox | ( | const CollisionBox * | Rival | ) | [protected, virtual] |
| void sp::scene::CollisionNode::performCollisionResolvingToCapsule | ( | const CollisionCapsule * | Rival | ) | [protected, virtual] |
| void sp::scene::CollisionNode::performCollisionResolvingToCone | ( | const CollisionCone * | Rival | ) | [protected, virtual] |
| void sp::scene::CollisionNode::performCollisionResolvingToCylinder | ( | const CollisionCylinder * | Rival | ) | [protected, virtual] |
| void sp::scene::CollisionNode::performCollisionResolvingToMesh | ( | const CollisionMesh * | Rival | ) | [protected, virtual] |
| void sp::scene::CollisionNode::performCollisionResolvingToPlane | ( | const CollisionPlane * | Rival | ) | [protected, virtual] |
| void sp::scene::CollisionNode::performCollisionResolvingToSphere | ( | const CollisionSphere * | Rival | ) | [protected, virtual] |
| bool sp::scene::CollisionNode::performDetectedContact | ( | const CollisionNode * | Rival, | |
| const SCollisionContact & | Contact | |||
| ) | [protected] |
Returns true if the collision has been resolved.
| void sp::scene::CollisionNode::setFlags | ( | s32 | Flags | ) | [inline] |
Sets the flags for collision detection. By default COLLISIONFLAG_FULL.
| void sp::scene::CollisionNode::setMaterial | ( | CollisionMaterial * | Material | ) | [virtual] |
Sets the collision material.
| void sp::scene::CollisionNode::setOffset | ( | const dim::matrix4f & | Matrix, | |
| bool | Enable = true | |||
| ) |
Sets the transformation offset. This matrix will be multiplied to the scene-node's global transformation.
| void sp::scene::CollisionNode::setPosition | ( | const dim::vector3df & | Position, | |
| bool | UpdatePrevPosition = true | |||
| ) |
Sets the global position of the scene node.
| void sp::scene::CollisionNode::setRotation | ( | const dim::matrix4f & | Rotation | ) | [inline] |
Sets the global rotation of the scene node.
| void sp::scene::CollisionNode::setScale | ( | const dim::vector3df & | Scale | ) | [inline] |
Sets the global scaling of the scene node.
| void sp::scene::CollisionNode::setupTransformation | ( | const dim::matrix4f & | Matrix | ) |
Sets up the collision node transformation directly. Only use this if you want to use a custom transformation for the collision node.
| void sp::scene::CollisionNode::translate | ( | const dim::vector3df & | Direction | ) | [inline] |
Wrapper function for SceneNode::translate.
| void sp::scene::CollisionNode::turn | ( | const dim::vector3df & | Rotation | ) | [inline] |
Wrapper function for SceneNode::turn.
| void sp::scene::CollisionNode::updateCollisions | ( | ) |
Updates all collisions with other collision-nodes. This will be called for each collision-node when "updateScene" is called from the collision-graph.
| void sp::scene::CollisionNode::updatePrevPosition | ( | ) | [protected] |
| void sp::scene::CollisionNode::updateTransformation | ( | ) |
Updates the collision-node's transformation. Call this after you have changed the scene-node's transformation. Or only use the transformation functions of the collision-node itself.
// Use this: MySceneNode->translate(dim::vector3df(0, 0, 1)); MyCollisionNode->updateTransformation(); // Or this: MyCollisionNode->translate(dim::vector3df(0, 0, 1));
friend class CollisionGraph [friend] |
friend class CollisionMaterial [friend] |
 1.7.1
1.7.1

