List of all members.
Detailed Description
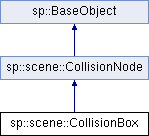
CollisionBox is one of the collision models and represents an axis-aligned-bounding box which is - although it is axis-aligned - rotatable. Rotation is anyway possible because of inverse rotations inside the collision functions.
Constructor & Destructor Documentation
| sp::scene::CollisionBox::~CollisionBox |
( |
|
) |
|
Member Function Documentation
Checks for an intersection between this collision object and the given line and stores the result in the specified contact structure.
- Parameters:
-
| Line,: | Specifies the line which could intersect this object. |
| Contact,: | Specifies the structure where the intersection result will be stored. |
- Note:
- The implementations of this interface function normally only store the point and normal vector of an intersection.
Reimplemented from sp::scene::CollisionNode.
| bool sp::scene::CollisionBox::checkIntersection |
( |
const dim::line3df & |
Line, |
|
|
bool |
ExcludeCorners = false | |
|
) |
| | const [virtual] |
Returns true if an intersection between this collision object and the given line exists but does not return any further information.
- Parameters:
-
| Line,: | Specifies the line which could intersect this object. |
| ExcludeCorners,: | Specifies whether the line's corners should be ingored. This can be useful for ray-tracing or lightmapping to avoid self-shadowing. |
Reimplemented from sp::scene::CollisionNode.
| f32 sp::scene::CollisionBox::getMaxMovement |
( |
|
) |
const [virtual] |
Returns the maximal movement (e.g. for a sphere it's the radius). This is used internally. A collision node can still be moved faster than this value.
Implements sp::scene::CollisionNode.
| s32 sp::scene::CollisionBox::getSupportFlags |
( |
|
) |
const [virtual] |
| void sp::scene::CollisionBox::setBox |
( |
const dim::aabbox3df & |
Box |
) |
[inline] |
The documentation for this class was generated from the following files:
- D:/SoftwareEntwicklung/C++/HLC/Tools/SoftPixelEngine/repository/sources/SceneGraph/Collision/spCollisionBox.hpp
- D:/SoftwareEntwicklung/C++/HLC/Tools/SoftPixelEngine/repository/sources/SceneGraph/Collision/spCollisionBox.cpp
 1.7.1
1.7.1

